

Safety in collaboration with Robot systems
Recent years have seen significant advancements in industrial automation applications in the fields of drive systems and object detection, paving the way for a new age of interaction between human and machine. Depending on the amount of interaction between the robot and human, different levels of safety precautions are needed.
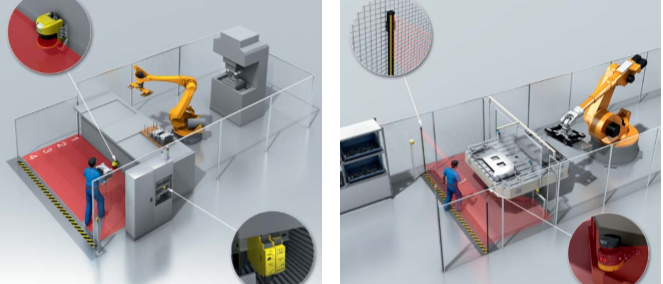
Coexistence
Even in industrial robot applications in which no human intervention is required during the production process, it will still be necessary for an operator to enter the robot's workspace, e.g., for the purpose of maintenance work. In applications of this type, the workspace must be fenced off and the access doors must be interlocked. The interlock must ensure that hazardous robot functions are shut down whenever an operator enters the hazardous area.
.png)
Cooperation
In cooperative application scenarios, operator and robot complete the necessary stages of the process in the same workspace at different times. Here too, technical safety measures are required. Depending on how the loading and unloading system is set up, it may be appropriate to use opto-electronic protective devices such as safety light curtains or safety laser scanners.
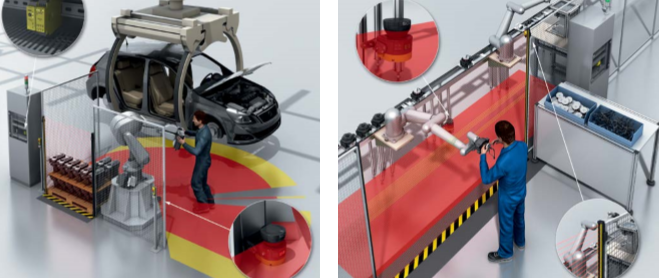
Collaboration
In certain applications, it is necessary for humans and active robots to interact in the same workspace at the same time. In these scenarios, which we call collaborative, the force, speed, and movement paths of the robot must be restricted. If they are available, inherent safety measures or additional safety measures such as limiting torque through the performance of the drives or safety-related parts of the system controller can be used to minimize risk. Force, speed, and movement paths must also be monitored and controlled based on the actual degree of risk. This application calls for reliable sensors that are able to detect human presence or determine the speed at which humans are moving towards the hazardous area and their distance from it.
Fundamental requirements
There are a number of fundamental requirements to be met by the design of collaborative applications:
• The collaborative workspace must meet the following requirements:
1. It must be laid out so that the operator is able to complete his or her tasks in a safe and problem-free manner, without being exposed to additional hazards posed by supplementary equipment or other machines in the workspace.
2. There must be no risk of injury as a result of cutting, crushing, or stabbing. Nor must there be any risks posed by such things as hot surfaces or live parts which cannot be mitigated by reducing the speed, force, or power of the robot system. The same of course also applies to the associated supporting equipment and workpieces.
• The operating space of the robot must be positioned a minimum distance away from adjacent accessible areas in which there is a risk of crushing or jamming. If this is not possible, additional protective devices must be used
• Wherever possible, safe axis limiting must be deployed in order to restrict the number of free movements of the robot in the space and thus to reduce the risk of personal injury.
Our Team
Neff Power's Application engineers can help you identify any safety concerns by completing a safety risk assessment. A safety risk assessment is the foundation to guide customers towards the best business decisions that balance both security and compliance. We can provide you with a full risk assessment to help identity risk factors today before they become major problems tomorrow. Click this link to learn more!
Neff Power Learning Center
The Neff Power Learning Center was created to connect with industrial automation users and customers by providing engineering tips and tricks, application success stories and videos, and useful content from our vendors. We are dedicated to offering products and solutions to meet our customers' needs, from automating and optimizing factories to all things safety and preventing industrial accidents.
Check out our Learning Center often for more great information or subscribe to be notified when new posts are updated.
